梦想照现实!智能网联汽车产业链全景解析
作者: 发布于:2016-04-05 16:19:32 来源:中汽创新创业中心
一、理想距离现实有多远无人驾驶关键技术解读
(一)、无人驾驶的概念
无人驾驶是智能汽车发展的终极阶段,背后蕴藏着解放驾驶人时间、提高道路安全以及车联网入口等巨大经济效益。按目前较为权威的美国高速公路安全局分类,无人驾驶发展将经历4个阶段,目前2 级阶段的技术已部分实现商业化量产,也即高端车型配备的自适应巡航、自动停车等高级辅助驾驶系统。而部分实验室阶段的无人车辆已能实现部分道路条件乃至全工况下的无人驾驶。2020 年将成为无人驾驶实现商业化突破元年,引领传统汽车行业巨大变革。从各大车企与互联网巨头公布的计划看,2020 年将成为无人驾驶车辆商业化元年,并从此进入爆发增长。据IHS 预测,2025 年全球无人驾驶汽车销量将达到23 万辆,2035 年将达到1180 万辆,届时无人驾驶汽车保有量将达到5400 万辆。其中,北美市场上的份额将达到29%,中国为24%,西欧为20%。

(二)单车智能是基础,实现无人驾驶的终极形态
无人驾驶汽车的技术研究可以分为两个阶段,一个是单车智能阶段,另一个是智能交通阶段。单车智能的技术核心是使汽车机器人化,即能够通过综合应用毫米波雷达,激光雷达和光学摄像头等多种传感器来使汽车感知车身周围的环境,然后车载驾驶计算机根据环境的变化,结合通过CAN总线上收集的汽车工况信息,综合计算出下一秒的控制策略。通过将控制指令发送到汽车自动控制机构里执行,形成一个闭环控制系统。由于这一方向的研究无需将无人驾驶汽车并入联网系统中,在人工智能的基础上通过自身传感器截取信息并结合环境模型给出运动控制方案,我们定义为单车智能。我们认为,单车智能是无人驾驶技术的基础,是实现无人驾驶终极形态的根本路径。
作为一个复杂的智能系统,无人驾驶单车智能设计的内容主要包括如下几个方面:
环境感知
环境感知是实现无人驾驶的前提。无人驾驶的环境感知像人类的视听感觉一样,利用各种传感器对环境进行数据采集,获取行驶环境信息,并对信息中的数据进行处理。环境感知系统为无人驾驶提供了本车和周围障碍物的位置信息,以及本车与周围其他车辆等障碍物的相对距离、相对速度等信息,进而为各种控制决策提供信息依据。它是无人驾驶实现避障、定位和路径规划等高级智能行为的前提条件和基础。
软件端
环境感知的核心在于算法。无人驾驶通过传感器探测环境信息,然而计算机并不知道探测到的数据映射到真实环境中的物理含义,必须通过合适的算法挖掘出有价值的数据并赋予其物理含义从而达到感知环境的目的。比如驾驶员可以从前方的环境中分辨出当前行驶的车道线。但机器获取车道线信息时需要通过摄像头获取环境影像,并通过算法从该影像中找到能映射到真实车道线的影像部分,赋予其车道线含义。

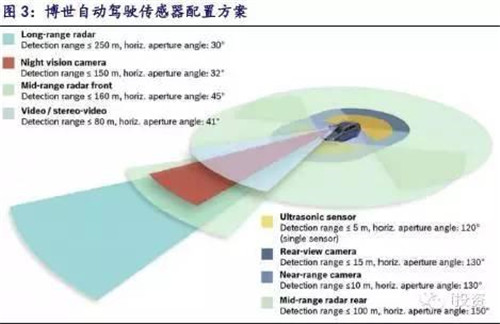
硬件端
多传感器融合(Sensor Fusion)是实现无人驾驶环境感知的必然趋势。自动驾驶车辆感知环境的传感器繁多,常见的包括摄像头、激光扫描仪、毫米波雷达以及超声波雷达等。不同的传感器采用的感知算法会有所区别,每一种传感器感知环境的能力和受环境的影响也各不相同。比如摄像头在物体识别方面有优势,但是距离信息比较欠缺,基于它的识别算法受天气、光线影响也非常明显。激光扫描仪及毫米波雷达,能精确测得物体的距离,但是在识别物体方面远弱于摄像头。随着ADAS技术的发展,弥补单一传感器的不足,在不同天气条件下满足无人驾驶对图像识别精度和智能判断可靠性的要求,一个重要的趋势即将不同传感器专用功能集成到更加综合性的系统中进行筛选融合,使传感器之间能够优势互补,最终达到提升精确性的目的,是未来无人驾驶技术的发展趋势。目前国际领先的零部件供应商如德尔福、德州仪器、飞思卡尔等开发的组合感知模块已应用到量产车上。
路径规划
路径规划为无人车提供行驶的最佳路线。路径规划是指在一定环境模型基础上,给定无人驾驶汽车的起始点与目标点后,按照某一性能指标规划出一条无碰撞、能安全到达目标点的有效路径。路径规划包括大范围不考虑运动细节的全局路径规划以及具体到运动轨迹的局部路径规划,具体分为两个步骤:一是建立环境地图;二是调用搜索算法在环境地图中搜索可行路径。
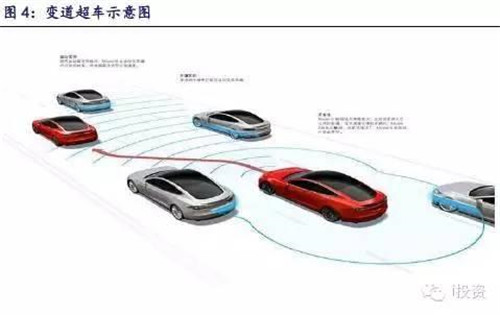
局部路径规划的可视为仿人类的机器“驾驶行为”的排列组合。车辆自主行驶的局部路径规划引入了“驾驶行为”的概念,包括车道保持、变换车道、路口直行、路口拐弯、掉头、绕障、智能启停、自动泊车等驾驶行为。通过行为的有序排列及有机衔接方可完成整个自动驾驶任务,这主要取决于算法实现。而车辆行驶中,何时采用何种行为,即为行为决策。 路径规划的突破口:以人类高级思维为基础的人工智能技术的升级。受到驾驶员的性格、安全意识和心情等因素影响,同样的工况下产生的驾驶行为的序列将发生差别。比如驾驶员在赶时间时会增加变道次数,超车的安全系数会降低;新手开车时由于变道时机把握不好,经常急刹车等;在面临事故时选择撞车还是撞旁边的人不同的人可能产生的选择。而这些属于人的高级思维的决策同时涉及到法律、伦理道德,目前机器还难以替代决策过程,只有通过人工智能技术的不断进步找到突破口。
定位导航
无人驾驶通过定位导航系统获得汽车的位置、姿态等信息,定位导航系统是无人驾驶的必要条件。常用的定位导航技术有航迹推算(Dead-Reckoning,DR)技术、惯性导航(Inertial Navigation System, INS)技术、卫星导航定位技术、路标定位技术、地图匹配定位(Map Matching, MM)技术和视觉定位导航技术等。
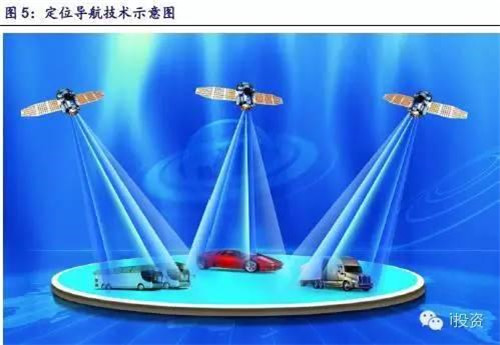
多种定位方式融合是定位导航技术发展的趋势。定位方法有多种,比如卫星定位、地面基站定位、视觉或激光定位以及惯导定位等。目前国内高校无人车使用卫星定位+基站定位方式比较多,后两种基本没有涉及到。由于每一种定位方式都有其局限性,定位方式融合是趋势。比如卫星定位系统虽然适用范围广、绝对位置精度高,但是其不适用于室内或有遮挡物区域、位置也会随时间漂移;视觉或激光定位相对位置精度非常高,无位置漂移,但是其受环境影响非常大。将定位技术应用到无人车上时,卫星定位可以解决大范围绝对位置定位、高速公路定位以及其他开阔空间定位问题,但是当车进入隧道、高建筑物路段或室内时,定位信号会不稳定或丢失。这时需要视觉或惯性导航等室内定位方式去弥补。车辆定位会直接或间接影响无人车运动控制与行为决策的实现,甚至也是感知环境所需的重要信息。在执行已经规划出来的运动轨迹时,运动控制算法需要定位信息不断反馈实际的运动状态做实时的调整。
运动控制
无人驾驶的运动控制分为纵向控制和横向控制。纵向运动控制通过对油门和制动的协调,实现对期望车速的精确跟随。而横向运动控制在保证车辆操纵稳定的前提下,实现无人驾驶的路径跟踪。

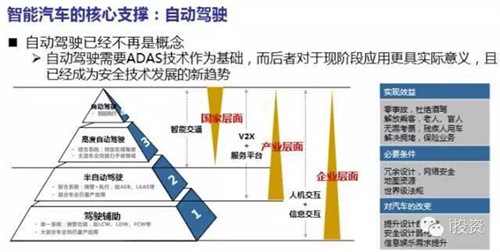
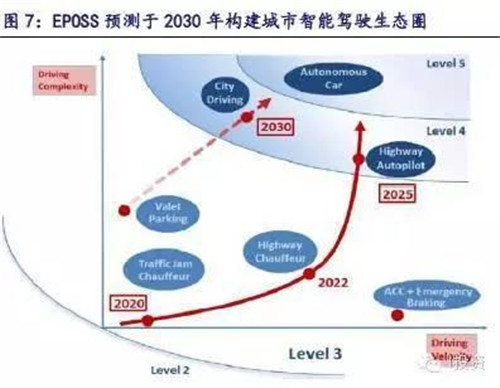
(三)车联网与智能交通催化,构建未来城市智能驾驶生态圈
无人驾驶汽车的技术研究的另一个阶段,也即智能交通阶段,可分为车联网与智能交通两个方向,两者是推进无人驾驶技术发展的强力催化剂。无人驾驶技术的发展期间必然存在一段无人驾驶与传统汽车并行的时期,直至过渡至完全无人驾驶阶段,我们定义为城市智能驾驶生态圈。据欧洲工业行业联盟成立的EPOSS 预测,这一终极形态将于2030 年到达。在过渡阶段,无人驾驶汽车不仅要实现有人驾驶与无人驾驶的无缝结合、进行良好的人机交互,还要具有车与车交互的功能。车联网与智能交通系统将人、车、路综合,并运用先进计算机、通信与控制技术,能够实现城市交通拥堵治理并提高交通安全,为无人驾驶汽车提供技术与智能化道路设施支持。我们认为在单车智能技术的基础上,车联网与智能交通的发展将成为无人驾驶技术的强力助推器,并助力无人驾驶普及、最终构建城市智能驾驶生态圈。
车联网通常指车与车(V2V)、车与路面基础设施(V2I)、车与人(V2P)、车与传感设备的交互,从各车辆广泛联网那个从而展开各种综合应用的通信系统。车联网的构建将帮助无人驾驶汽车实现更好的技术控制。比如,公路正常行驶的两汽车通过联网交换信息(V2V),能有效降低盲点较大的交叉路口的交通事故率,或在前车制动同时向后车发出信号、实现两车联动控制增加行车安全。而通过V2I 技术,无人驾驶车辆可提前探知路面交通信号等情况、或根据道路拥堵情况进行合理路径规划等。
无人驾驶汽车是城市智能驾驶生态圈的重要组成部分。智能交通技术与无人驾驶技术的相互促进,传感器技术与信息技术的不断发展,处理器与芯片性能的不断提高,都将为未来出行提供新的解决方案。车联网与智能交通的发展将助推无人驾驶技术发展迈上新台阶。
本网拥有此文版权,若需转载或复制,请注明来源于政府采购信息网,标注作者,并保持文章的完整性。否则,将追究法律责任。
网友评论













